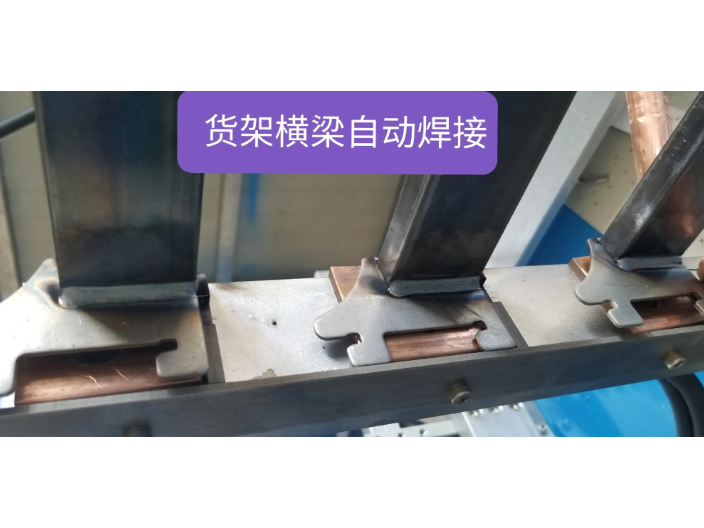
激光自动焊机私人定做
送丝气缸控制顶推杆的伸缩,从而使得调节架沿着送丝导轨的方向进行前后移动,从而实现了送丝杆的前后调节。附图说明下面结合附图对本实用新型作进一步说明:图1为本实用新型一种用于笛型管自动焊机的加热机构的结构示意图;图2为图1中a向的结构示意图;图3为本实用新型中送送丝杆、转动件、送丝调节件连接的结构示意图;图4为本实用新型中焊枪与焊枪气缸连接的结构示意图。图中,1-焊枪;2-送丝杆;3-固定架;4-转动件;5-送丝调节件;6-安装座;7-安装板;8-转轴;9-转动块;10-送丝气缸;11-调节架;12-送丝导轨;13-送丝气缸固定板;14-顶推杆;15-横向滑槽;16-焊枪导轨;17-滑移座;18-焊枪气缸;19-焊枪气缸调节件;20-焊枪固定板;21-焊枪杆;22-摆动电机;23-摆动杆;24-连接块。具体实施方式如图1至图4所示,为本实用新型一种用于笛型管自动焊机的加热机构,包括焊枪1、送丝杆2与固定架3,焊枪1与送丝杆2均位于固定架3上,焊枪1位于送丝杆2的一侧,固定架3上设有转动件4,转动件4上固定连接有送丝调节件5,送丝杆2设于送丝调节件5上。固定架3上固定连接有安装座6,转动件4设于安装座6上,转动件4的端部固定连接有安装板7,送丝调节件5设于安装板7的顶部。自动焊机可以实现焊接过程的远程控制。激光自动焊机私人定做

可以采用储能焊接或拉弧焊接将螺柱牢牢的焊接到工件上,保证焊接精度和焊接强度。焊接效率大约3-10个/分钟,螺柱规格:直径3-8mm,长度:5-40mm。焊接机器人生产线焊接机器人生产线比较简单的是把多台工作站(单元)用工件输送线连接起来组成一条生产线。这种生产线仍然保持单站的特点,即每个站只能用选定的工件夹具及焊接机器人的程序来焊接预定的工件,在更改夹具及程序之前的一段时间内,这条线是不能焊其他工件的。另一种是焊接柔性生产线(FMS-W)。柔性线也是由多个站组成,不同的是被焊工件都装卡在统一形式的托盘上,而托盘可以与线上任何一个站的变位机相配合并被自动卡紧。焊接机器人系统首先对托盘的编号或工件进行识别,自动调出焊接这种工件的程序进行焊接。这样每一个站无需作任何调整就可以焊接不同的工件。焊接柔性线一般有一个轨道子母车,子母车可以自动将点固好的工件从存放工位取出,再送到有空位的焊接机器人工作站的变位机上。也可以从工作站上把焊好的工件取下,送到成品件流出位置。整个柔性焊接生产线由一台调度计算机控制。因此,只要白天装配好足够多的工件,并放到存放工位上,夜间就可以实现无人或少人生产了。浙江台式自动焊机自动焊机的焊接方式可以根据焊接工艺和要求进行选择和调整。
焊枪气动升降机构和尾座气动顶紧机构可满足自动焊接和自动装夹的要求,提高生产效率;根据工件焊接的要求,可选配气动升降托架,焊缝跟踪装置、焊接摆动器;采用运动控制器可编程控制器作为主控单元,工业用触摸屏操作界面,自动化程度高,焊接质量稳定可靠;可通过修改控制软件的程序及参数来调节设备的功能,实现圆形、半圆形、分段多段圆弧、环形焊缝的焊接⒊焊接操作架焊接操作机一般由立柱、横梁、回转机构、台车等部件组成。各部件为积木式结构,一般立柱、横梁为其基本部件,其余部件可据用户使用要求选配。一般适用于压力容器中锅炉汽包,石化容器等圆筒形工件的内外缝的纵缝焊和环缝焊焊接。
由焊头对工件进行熔接、焊接完毕气缸带动上模复位,压紧气缸上升,操作员将工件取出完成一次操作。焊接机激光焊接机编辑焊接机激光焊接的原理激光焊接机是利用高能量的激光脉冲对材料进行微小区域内的局部加热,激光辐射的能量通过热传导向材料的内部扩散,将材料熔化后形成特定熔池。它是一种新型的焊接方式,激光焊接主要针对薄壁材料、精密零件的焊接,可实现点焊、对接焊、叠焊、密封焊等,深宽比高,焊缝宽度小,热影响区小、变形小,焊接速度快,焊缝平整、美观,焊后无需处理或只需简单处理,焊缝质量高,无气孔,可精确控制,聚焦光点小,定位精度高,易实现自动化。焊接机焊接特性属于熔融焊接,以激光束为能源,冲击在焊件接头上。激光束可由平面光学元件(如镜子)导引,随后再以反射聚焦元件或镜片将光束投射在焊缝上。激光焊接机属非接触式焊接,作业过程不需加压,但需使用惰性气体以防熔池氧化,填料金属偶有使用。激光焊可以与MIG焊组成激光MIG复合焊,实现大熔深焊接,同时热输入量比MIG焊大为减小。焊接机***(1)可将入热量降到低的需要量,热影响区金相变化范围小,且因热传导所导致的变形亦低。(2)32mm板厚单道焊接的焊接工艺参数业经检定合格。自动焊机是未来焊接技术的发展方向。
自动焊机在使用过程中,会产生一些废气、废水和固体废物等污染物,对环境造成一定的影响。为了提高自动焊机的环保性能,可以采取以下措施:1.选择低排放的焊接设备:在选择自动焊机时,应该选择具有低排放性能的设备,例如采用低排放的焊接电源、气体等。2.减少废气排放:在使用自动焊机时,应该尽可能减少废气的排放,例如在通风条件良好的地方进行焊接,使用低排放的气体等。3.处理废水:自动焊机在使用过程中会产生废水,需要对废水进行处理,例如采用物理、化学或生物处理方法,使废水达到排放标准。4.固体废物处理:自动焊机使用后产生的固体废物,例如焊接渣等,需要妥善处理,例如回收利用或者安全处理。5.加强监管:国家应该加强对自动焊机的监管,制定相关的环保法规和标准,加强对企业的监督和管理,确保自动焊机的环保性能得到有效提升。综上所述,自动焊机的环保性能对于企业和社会的可持续发展至关重要,应该采取有效措施降低其对环境的影响。 自动焊机可以实现焊接过程的智能化。马鞍山自动焊机价格
自动焊机的焊接方式可以根据不同的焊接需求进行选择和切换。激光自动焊机私人定做
运行轨迹更加贴近示教的轨迹。焊接机器人特点编辑点焊对焊接机器人的要求不是很高。因为点焊只需点位控制,至于焊钳在点与点之间的移动轨迹没有严格要求,这也是机器人早只能用于点焊的原因。点焊用机器人不要有足够的负载能力,而且在点与点之间移位时速度要快捷,动作要平稳,定位要准确,以减少移位的时间,提高工作效率。点焊机器人需要有多大的负载能力,取决于所用的焊钳形式。对于用与变压器分离的焊钳,30~45kg负载的机器人就足够了。但是,这种焊钳一方面由于二次电缆线长,电能损耗大,也不利于机器人将焊钳伸入工件内部焊接;另一方面电缆线随机器人运动而不停摆动,电缆的损坏较快。因此,目前逐渐增多采用一体式焊钳。这种焊钳连同变压器质量在70kg左右。考虑到机器人要有足够的负载能力,能以较大的加速度将焊钳送到空间位置进行焊接,一般都选用100~150kg负载的重型机器人。为了适应连续点焊时焊钳短距离快速移位的要求。新的重型机器人增加了可在。这对电机的性能,微机的运算速度和算法都提出更高的要求。焊接机器人结构设计编辑由于所设计的焊接机器人是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,**焊缝自动焊接。激光自动焊机私人定做