无锡便携高精度激光跟踪仪三脚架
同步信号处理测量软件该软件是自主研发的用于处理分析多台联动激光跟踪仪反馈数据的专业测量软件。同步信号处理软件可满足用户的使用需求,具体包括:实现对多台激光跟踪仪坐标系统的统一、实现被测目标坐标的定义、实现多台激光跟踪仪动态测量数据的组合分析(比如动态姿态角度的测量等)。航天器登陆舱姿态的6维(6DoF)监测、控制与实时调整测量目的:航天器登陆舱在登陆过程中受到引力、气流等诸多因素影响,会造成晃动。实验中,用拉伸机构模拟造成登陆舱晃动的力,用多台激光跟踪仪同步监测各参照点之间的数学关系,从而得到科学数据,并依照数据调整登陆舱底部助推火箭喷射的力度和方向,使得登陆舱终可以稳定着陆。它可以实时监测目标的位置和运动状态。无锡便携高精度激光跟踪仪三脚架
工业机器人6维动态精度的实时监测测量目的:对工业机器人的精度进行6维动态追踪监测,从而更好地评估工业机器人在其运动路径上各个位置的空间精度,并依据数据对机器人进行相应的数据补偿与工作路径优化。测量过程:在工业机器人末端安置跟踪仪靶球支架,并在支架上布置3个靶球(SMR),三台激光跟踪仪各自跟踪一个靶球,并对该靶球在机器人运动过程中的各个位置进行实时动态采集测量。采集到的数据反馈至PC或笔记本电脑进行计算,并作为该机器人标定补偿的数据支撑。苏州便携式激光跟踪仪校准激光跟踪仪可轻松快速地进行现场测量,可将检测周期缩短 75%;

测量过程:(1)在登陆舱上设置P1、P2、P3三个点,利用三台激光跟踪仪对其在空间的姿态进行实时跟踪测量监测;(2)利用另外三台激光跟踪仪,对位于拉伸机构上的P4、P5、P6三个点进行实时跟踪监测;(3)通过数据同步器,对六台激光跟踪仪同时发布测量指令,分别在同一时间采集6个参照点的相应数据,并将数据传输到数据处理系统(PC或笔记本电脑);(4)利用同步测量软件对数据进行分析,并计算出各个参照点之间的数学关系,随即依照数据指导火箭推力力度和方向的调整。
传统的测量仪器和工具如测圆架、水准仪、求心器、内径或外径千分尺、百分表、游标卡尺等等,需要使用多种仪器或工具配合得到测量结果,然后再逐步演算,求出测量结果,引入了大量的累积误差,从而导致测量精度和可靠性的降低。例如:传统的转子测圆装置,在与转子的同心度调整上较为繁琐,需要架设求心器,用钢琴线反复进行测量校对,找到转子中心体中心后,才能进行测圆装置与转子中心的调整,费时费力;而且当遇到转子基准不以转子中心体环面作为基准时,传统的测圆装置就不能使用。激光跟踪测量系统基本都是由激光跟踪头(跟踪仪)、控制器、用户计算机、反射器(靶镜)及测量附件等组成。

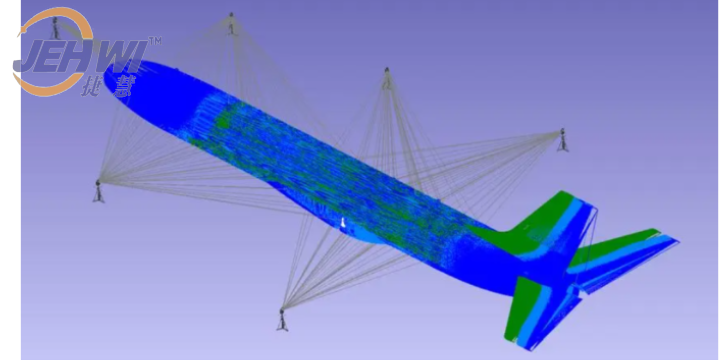
随着人工智能领域的不断发展,大数据、信息采集等越来越被各个行业所重视而提到了议事日程。为了配合这些工作的进行,拥有一个功能强大、方便实用的工具,是必不可少的先决条件。在工业智能化方面,激光跟踪仪与扫描仪的配合使用正发挥着重要的作用,主要应用于造型、逆向工程、工件数字化等方面。尤其在大型工件扫描方面,为了提高测量和扫描的精度,激光跟踪仪的使用是为关键的一步。由于手持式扫描仪受到扫描范围的限制,对于大型工件的扫描有时会出现拼接精度的问题,为了解决这一问题,采用激光跟踪仪与扫描仪配合使用,用激光跟踪仪对扫描仪的测量进行整体高精度定位,再用扫描仪完成具体的工件扫描。激光跟踪仪靶球国产的精度怎么样?丽水Leica激光跟踪仪三脚架
激光跟踪仪的环境适应性是指仪器在不同环境条件下的测量精度和稳定性。无锡便携高精度激光跟踪仪三脚架
方案特征1、实现目标6维(6DoF)动态高精度监测;2、大幅提升目标位置测量精度。系统构成1、激光跟踪仪激光跟踪仪配备了ADM(激光)与IFM(干涉激光)双激光;其中,IFM干涉激光是长度计量的标准,可为整个测量方案提供高精度保障及数据溯源。2、TTL(或其它方式的)数据同步系统数据同步系统是多台联动激光跟踪仪的同步触发装置,由API专门提供的信号发生器同时给多台联动的激光跟踪仪提供触发信号,使这些激光跟踪仪得到同步控制,确保它们在同一时间采集数据。同步的激光跟踪仪的数量可以由客户按实际状况而定。无锡便携高精度激光跟踪仪三脚架
上一篇: 无锡FARO激光跟踪仪
下一篇: 无锡法如激光跟踪仪校准